ຄົ້ນຫາ ຄົ້ນຫາ ຄົ້ນຫາ
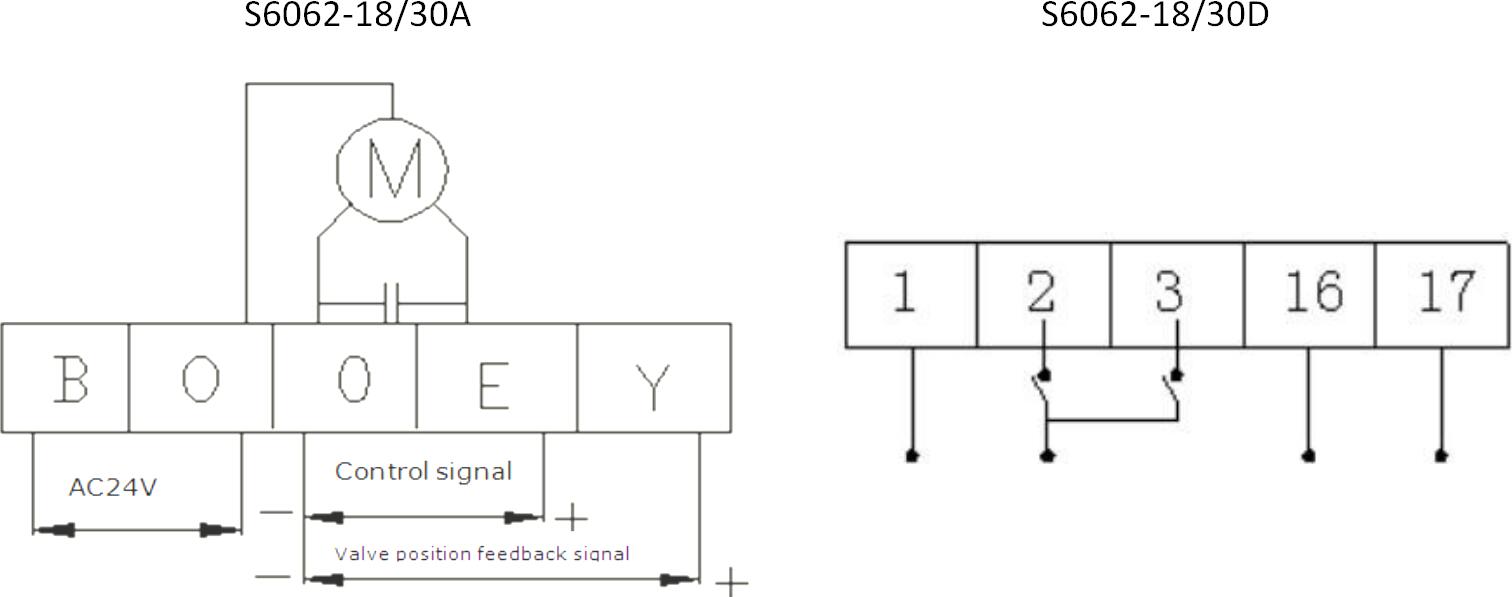
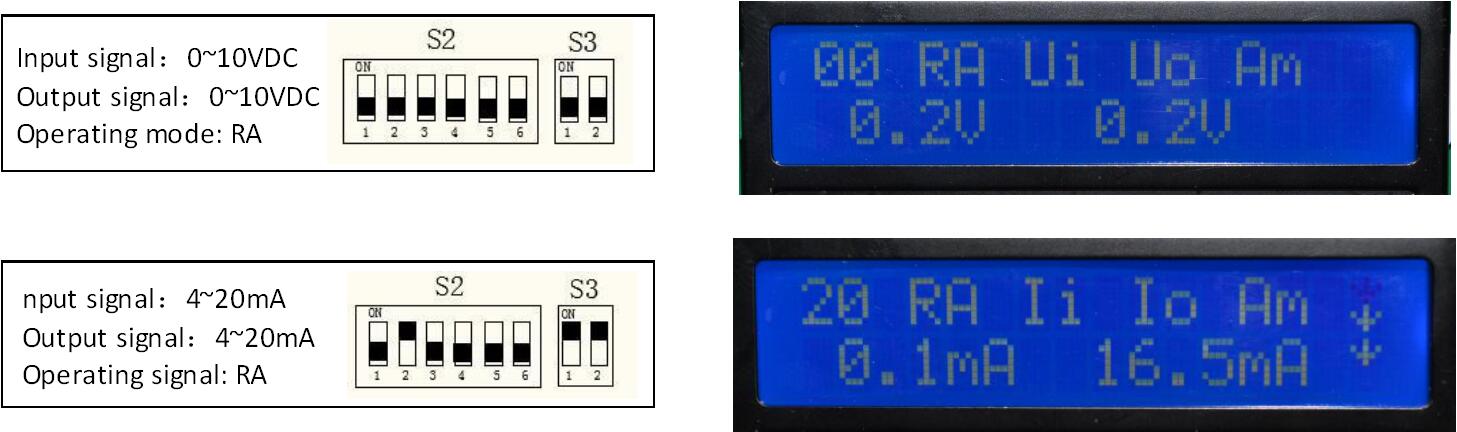
ຄົ້ນຫາ ຄົ້ນຫາ ຄົ້ນຫາ S6062-18/30A, 0~10V, 2~10V ຫຼື 0~20mA,4~20mA DC ສັນຍານຄວບຄຸມສໍາລັບການຄວບຄຸມອັດຕາສ່ວນ.
S6062-18/30D, ໃຫ້ການຄວບຄຸມການເພີ່ມຂຶ້ນປີ້ນກັບກັນ.
ມາພ້ອມກັບຟັງຊັນຄູ່ມື.ເຫມາະສໍາລັບການໂຕ້ຕອບປ່ຽງ Johnson ແລະ Siemens.

| ຕົວແບບ ພາລາມິເຕີ | S6062-18A | S6062-18D | S6062-30A | S6062-30D |
| ພະລັງງານ | 24VAC±15% | |||
| ແຮງບິດ | 1800 ນ | 3000N | ||
| ສັນຍານຄວບຄຸມ (ທາງເລືອກ) | 0~10VDC 2~10VDC 0~20mA 4~20mA | —— | 0~10VDC 2~10VDC 0~20mA 4~20mA | —— |
| ຄວບຄຸມ impedance input ສັນຍານ | ແຮງດັນ: 100 ປະຈຸບັນ: 250Ω | —— | ແຮງດັນ: 100 ປະຈຸບັນ: 250Ω | —— |
| ສັນຍານຕິຊົມ (ທາງເລືອກ) | 0~10VDC 2~10VDC 0~20mA 4~20mA | —— | 0~10VDC 2~10VDC 0~20mA 4~20mA | —— |
| ຄວາມຕ້ອງການໂຫຼດຜົນຕອບແທນ | ແຮງດັນ:>1 ປະຈຸບັນ: <=500Ω | —— | ແຮງດັນ:>1 ປະຈຸບັນ: <=500Ω | —— |
| ການນໍາໃຊ້ພະລັງງານ | 15VA | |||
| ເວລາເສັ້ນເລືອດຕັນໃນ (40mm) | 120 ສ | 160 ສ | ||
| ເສັ້ນເລືອດຕັນໃນສູງສຸດ | 42ມມ | |||
| ການທໍາງານຂອງການດໍາເນີນງານຄູ່ມື | ມາດຕະຖານ | |||
| ຂະໜາດ (ປະເພດມາດຕະຖານ) | 165*185*340(H)ມມ | |||
| ຮູບແບບການໂຕ້ຕອບ | Johnson ຄວບຄຸມ |
| Siemens |  |
ເມື່ອອຸນຫະພູມຂອງວົງເລັບຂັບສູງກວ່າ 150 °C, ແນະນໍາໃຫ້ໃຊ້ໄດທີ່ມີອຸນຫະພູມສູງ, ຮູບແບບຜະລິດຕະພັນໄດທີ່ມີອຸນຫະພູມສູງແມ່ນ S6062- 18/30AG ຫຼື S6062-18/30DG.
※ ຢ່າຕັດການເຊື່ອມຕໍ່ການສະຫນອງພະລັງງານແລະປະຕິບັດການອື່ນໆໃນລະຫວ່າງການຂະບວນການປັບອັດຕະໂນມັດຂອງໄດ.

| ສະຫຼັບ S2 DIP | ຟັງຊັນ | ການຕັ້ງຄ່າຄໍາອະທິບາຍຟັງຊັນມູນຄ່າ | |
| 1 | ການຕັ້ງຄ່າຄວາມອ່ອນໄຫວ | ON | HS: ຄວາມອ່ອນໄຫວສູງ |
| ປິດ | LS: ຄວາມອ່ອນໄຫວມາດຕະຖານ | ||
| 2 | ການຄວບຄຸມ / valve ຕໍາແຫນ່ງຄໍາຄຶດຄໍາເຫັນສັນຍານຈຸດເລີ່ມຕົ້ນການຕັ້ງຄ່າ | ON | 20%: ສັນຍານການໂຕ້ຕອບຂອງການຄວບຄຸມ / ວາວເລີ່ມຕົ້ນທີ່ 20% (ໃຊ້ສໍາລັບສັນຍານການຄວບຄຸມ / ວາວຕໍາແຫນ່ງຂອງ 4 ~ 20mA ຫຼື 2 ~ 10VDC) |
| ປິດ | 0: ສັນຍານການຄວບຄຸມ / ວາວຄໍາຄຶດຄໍາເຫັນເລີ່ມຕົ້ນທີ່ 0 (ໃຊ້ສໍາລັບການຄວບຄຸມ / ວາວສັນຍານຄໍາຄຶດຄໍາເຫັນຂອງ 4 ~ 20mA ຫຼື 2 ~ 10VDC) | ||
| 3 | ການຕັ້ງຄ່າຮູບແບບການເຮັດວຽກ | ON | DA: ເມື່ອສັນຍານຄວບຄຸມເພີ່ມຂຶ້ນ, spindle actuator ຂະຫຍາຍອອກ, ແລະໃນເວລາທີ່ສັນຍານການຄວບຄຸມແມ່ນຫຼຸດລົງ, spindle actuator retracts. |
| ປິດ | RA: ໃນເວລາທີ່ສັນຍານການຄວບຄຸມແມ່ນເພີ່ມຂຶ້ນ, spindle actuator retracts, ແລະໃນເວລາທີ່ສັນຍານການຄວບຄຸມແມ່ນຫຼຸດລົງ, spindle ຂັບຂະຫຍາຍອອກ. | ||
| 4 | ການຕັ້ງຄ່າໂໝດສັນຍານຢຸດ | ON | DW: ເມື່ອສັນຍານຄວບຄຸມຖືກຕັ້ງເປັນປະເພດແຮງດັນ ຫຼືປະເພດປັດຈຸບັນ, ຖ້າສາຍສັນຍານຖືກຕັດອອກໃນເວລານີ້, ສັນຍານຄວບຄຸມຂັ້ນຕ່ຳຈະຖືກສະໜອງໃຫ້ອັດຕະໂນມັດພາຍໃນຕົວກະຕຸ້ນ. |
| ປິດ | UP: 1) ເມື່ອສັນຍານຄວບຄຸມຖືກຕັ້ງເປັນປະເພດແຮງດັນ, ຖ້າສາຍສັນຍານຖືກຕັດອອກໃນເວລານີ້, ສັນຍານຄວບຄຸມສູງສຸດແມ່ນໃຫ້ອັດຕະໂນມັດພາຍໃນຕົວກະຕຸ້ນ. 2) ເມື່ອສັນຍານຄວບຄຸມຖືກຕັ້ງເປັນປະເພດປະຈຸບັນ, ຖ້າສາຍສັນຍານຖືກຕັດອອກໃນເວລານີ້, ສັນຍານຄວບຄຸມຂັ້ນຕ່ໍາຈະຖືກສະໜອງໃຫ້ອັດຕະໂນມັດພາຍໃນຕົວກະຕຸ້ນ. | ||
| 5 | ການປ່ຽນແປງຮູບແບບອັດຕະໂນມັດ / ຄູ່ມື | ON | MO: ຮູບແບບການຄວບຄຸມດ້ວຍມື: ການປ່ຽນແປງຂອງສັນຍານການຄວບຄຸມໃນ terminal ບໍ່ໄດ້ຖືກເກັບກໍາຕໍ່ໄປອີກແລ້ວ, ແລະທິດທາງການແລ່ນແມ່ນກໍານົດໂດຍສະຖານະຂອງຄູ່ມືການໂທຫາລະຫັດ S2-6. |
| ປິດ | AO: ໂຫມດການຄວບຄຸມອັດຕະໂນມັດ: ການດໍາເນີນງານອັດຕະໂນມັດແລະການຈັດຕໍາແຫນ່ງຕາມການຕັ້ງຄ່າແລະການປ່ຽນແປງຂອງສັນຍານຄວບຄຸມໃນ terminal. | ||
| 6 | ທິດທາງຮູບແບບຄູ່ມື | ON | MO-UP: ໃນໂຫມດຄູ່ມື, spindle actuator ແລ່ນຂຶ້ນ. |
| ປິດ | MO-DW: ໃນໂຫມດຄູ່ມື, spindle actuator ແລ່ນລົງ. | ||
| ສະຫຼັບ S3 DIP | ຟັງຊັນ | ການຕັ້ງຄ່າຄໍາອະທິບາຍຟັງຊັນມູນຄ່າ | |
| 1 | ການຕັ້ງຄ່າປະເພດສັນຍານຕໍາແໜ່ງວາວ | ON | I-OUT: ສັນຍານຕອບຮັບຕໍາແໜ່ງວາວແມ່ນປະເພດປັດຈຸບັນ. |
| ປິດ | V-OUT: ສັນຍານຕອບຮັບຕຳແໜ່ງວາວແມ່ນປະເພດແຮງດັນ | ||
| 2 | ຄວບຄຸມການຕັ້ງຄ່າປະເພດສັນຍານ | ON | I-IN: ສັນຍານຄວບຄຸມແມ່ນປະເພດປະຈຸບັນ |
| ປິດ | V-IN: ສັນຍານຄວບຄຸມແມ່ນປະເພດແຮງດັນ | ||
| ທຸງນ້ອຍ | ຟັງຊັນ | ລາຍລະອຽດ | ||
| ຕົວຊີ້ວັດ LED | ພະລັງງານ | ພະລັງງານ | ມັນເປີດຢູ່ສະເໝີເມື່ອພະລັງງານຫຼັກຂອງຕົວກະຕຸ້ນເປີດ | |
| UP | UP | ມັນຈະກະພິບເມື່ອຕົວກະຕຸ້ນ spindle ແລ່ນຂຶ້ນ | ||
| ລົງ | ລົງ | ມັນຈະກະພິບເມື່ອຕົວກະຕຸ້ນ spindle ແລ່ນລົງ | ||
| ຜິດພາດ | ຜິດພາດ | ມັນຈະເປີດເມື່ອຕົວກະຕຸ້ນຖືກແຕກ | ||
| MM | MM | ມັນຈະເປີດໃນເວລາທີ່ເລືອກປະເພດຄູ່ມື | ||
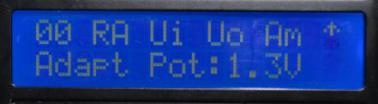
| ຈໍ LCD | A | ຈຸດເລີ່ມຕົ້ນຂອງສັນຍານ | ສະແດງສະຖານະການຕັ້ງຄ່າປັດຈຸບັນຂອງສະວິດ DIP S2-2 | |
| B | ຮູບແບບການເຮັດວຽກ | ສະແດງສະຖານະການຕັ້ງຄ່າປັດຈຸບັນຂອງສະວິດ DIP S2-3 | ||
| C | tyoe ສັນຍານເຂົ້າ | ສະແດງສະຖານະການຕັ້ງຄ່າປັດຈຸບັນຂອງສະວິດ DIP S3-2 | ||
| D | ປະເພດສັນຍານອອກ | ສະແດງສະຖານະການຕັ້ງຄ່າປັດຈຸບັນຂອງສະວິດ DIP S3-1 | ||
| E | ຮູບແບບການເຮັດວຽກ | ສະແດງສະຖານະການຕັ້ງຄ່າປັດຈຸບັນຂອງສະວິດ DIP S2-5 | ||
| ປ້ອນຂໍ້ມູນ | ປະເພດສັນຍານເຂົ້າ | ສະແດງສັນຍານການຄວບຄຸມທີ່ໄດ້ຮັບໃນປັດຈຸບັນໃນເວລາຈິງ | ||
| ອອກ | ປະເພດສັນຍານອອກ | ສະແດງສັນຍານຕໍາແຫນ່ງປ່ຽງອອກໃນປະຈຸບັນໃນເວລາຈິງ |